1
Introduction & Overview [M. Visbeck, Chief Scientist]
1.1
AnSlope, the Program
AnSlope's primary goal is to
identify the principal physical processes that govern the transfer of
shelf-modified dense water into intermediate and deep layers of the adjacent
deep ocean. At the same time, we seek to
understand the compensatory poleward flow of waters
from the oceanic regime. We identify the upper continental slope as the
critical gateway for the exchange of shelf and deep ocean waters. Four specific
objectives: [A] Determine the ASF mean structure and the principal scales of
variability (spatial from ~1 km to ~100 km, and temporal from tidal to
seasonal), and estimate the role of the Front on cross-slope exchanges and
mixing of adjacent water masses; [B] Determine the influence of slope
topography (canyons, proximity to a continental boundary, isobath
divergence/convergence) on frontal location and outflow of dense Shelf Water;
[C] Establish the role of frontal instabilities, benthic boundary layer transports,
tides and other oscillatory processes on cross-slope advection and fluxes; and
[D] Assess the effect of diapycnal mixing
(shear-driven and double-diffusive), lateral mixing identified through
intrusions, and nonlinearities in the equation of state (thermobaricity
and cabbeling) on the rate of descent and fate of outflowing, near-freezing Shelf Water.
AnSlope core elements are:
moorings; CTD-O2/ADCP and CTD-mounted Microstructure Profiling
System (CMiPS); CFC, oxy-18, tritium/helium tracers;
and basic tidal modeling.
In addition to the core AnSlope
activities we hosted three ancillary projects during this ANSLOPE II cruise:
Phytoplankton Biomass Ancillary Project, Cetacean Ancillary Project and
dedicated Sea Ice observations.
The cruise activities of these elements are reported
below:
• CTD/LADCP/Tracer
• Moorings
• XBT/XCTD section
• Sea Ice
• Phytoplankton Biomass
• Cetacean, marine mammal
and wildlife observations
• Antarctic Scout Research Program
International Collaboration: The Italian
CLIMA [Climate Long–term Interaction of the Mass
balance of
The AnSlope field phase consists of three cruises within 12 to
14 months, with moorings in place throughout the period:
AnSlope 1: February 25 to
AnSlope 2: February
23 to
AnSlope 3:
1.2 AnSlope-2 Personnel
Science Staff
|
Martin Visbeck |
Chief Scientist |
LDEO |
|
Andreas Thurnherr |
LADCP/CTD/tracer
sampling |
LDEO |
|
Bruce Huber |
LADCP/CTD/tracer
sampling |
LDEO |
|
Philip Mele |
CTD/oxygen |
LDEO |
|
Erin Stone |
oxygen/CTD/bio |
LDEO |
|
Suzanne Rab-Green |
CFC/autosal |
LDEO |
|
Ellio Paschini |
CTD/autosal |
CLIMA/ISMAR-CNR |
|
Giorgio Budillon |
CTD/salinity-cfc sampling |
CLIMA/ Università di Napoli
"Parthenope" |
|
Alejandro Orsi |
Moorings |
TAMU |
|
Jay Simpkins |
Moorings |
OSU |
|
Kathryn Brooksforce |
Moorings |
OSU |
|
Fred Martwich |
Moorings |
NASA-Ames |
|
Brendan Hart |
Moorings |
OSU |
|
Margaret Knuth |
Sea ice |
Clarkson Univ |
|
William Lipscomb |
Sea ice |
Los Alamos Laboratory |
|
Ana Širović |
Marine Mammal Acoustics |
SIO/MPL |
|
Deb Thiele |
Cetacean observations |
IWC |
|
Deb Glasgow |
Cetacean observations |
IWC |
CLIMA = Climate Long–term Interaction of the Mass
balance of
LDEO = Lamont-Doherty Earth Observatory
OSU =
TAMU =
IWC=International Whaling Commission
SIO = Scripps Institution of Oceanography
RPSC
Support Staff
|
Marine Projects Coordinator |
Karl Newyear |
|
Marine Technician |
Jesse Doren |
|
|
Emily Constantine |
|
|
Annie Coward |
|
|
Josh Spillane |
|
Marine Science
Technician |
Mo Hodgins |
|
Information
Technician |
Kevin Bliss |
|
|
Paul Huckins |
|
|
Suzanne O’Hara |
|
Electronics
Technician |
Sheldon Blackman |
|
|
Jeff Otten |
|
As needed |
|
1.3
AnSlope-2 Accomplishments:
The Chief Scientist's weekly SitReps
with those of the Karl Newyear document the
activities during the AnSlope 2 cruise. Despite at
times harsh weather conditions all cruise objectives were met in a timely
manner.
The Track and Station array:
Table 1. in the Appendix describes the 232 CTD/LADCP/Tracer
stations. The station array is depicted
in Figure 1 of the Appendix.
Preliminary Research Results:
AnSlope-2 cruise activities may be divided into several
parts:
Our main two goals were to recover all ANSLOPE moorings and
to redeploy a subset of them for a second season as well as to extend the
hydrographic surveys obtained during the Anslope 1 cruise.
We recovered 11 of the 12 moorings in record time under
favorable ice conditions. One mooring could not be located and must be assumed
as lost. We deployed 6 moorings in a with the stronger than expected maximum
flow velocities. Alex Orsi’s section below gives more
detail on each of the moorings and the position of the new array. We also deployed
one mooring, supported by
We were able to take 232 CTD casts during the cruise. This
is first and foremost a consequence of the superb collaboration between ship’s
crew, Raytheon science support and the science party. The objectives of the CTD
stations were twofold. We wanted to enhance the data set in the high energy
core ANSLOPE region near the Drygalski trough outflow
as well as to cover the regional scale differences between the Drygalski trough and the other two main sources of new
bottom water to the east: The Joides plume and the Glomar Challenger (or Pennell
trough) outflow. The latter is also actively studied by a mooring array as part
of the Italian CLIMA program.
During this cruise we have taken most CTD stations in
section form. Thus we traversed the shelf break front and its associated flow
bands on a perpendicular track and choose dense sampling when the bathymetry
was rapidly changing.
Of the 33 primary sections taken during the Anslope 2 cruise
24 crossed the shelf break or other mayor ridges while 7 sections were following
roughly the shallowest parts of the troughs in order to document the types of
water that make up the downslope plumes. We also
learned about to on shelf flow of modified Circumpolar Deep Water.
The large scale picture:
After leaving McMurdo and taking several
CTD stations in
Our first section followed the axis of the Drygalski trough from
Using all the historical data available from the western Ross Shelf one can construct an average picture of the water mass properties from southeast to northwest. The temperatures are largely close to the freezing point of seawater (not shown). However, the salinity distribution shows clearly that the saltiest near bottom water is located in the Drygalski trough because of its vicinity to the Terra Nova Polynya. Secondly a significant east to west salinity gradient at the level of the various sills in the 400-550 m depth range is apparent with much lower salinities in the eastern part of the Ross Shelf.
With that in mind we would expect the saltiest and thus
densest overflow plume to come out of the Drygalski
Trough followed by the Joides Trough and Pennell (or Glomar Challenger)
outflow to the east. During this cruise we were able to sample all of the three
overflows and will compare them in a tour following the shelf break front from
east to west by way of ten selected hydrographic sections.
The
The easternmost section of the AnSlope-2 cruise left the
The next cross shelf section was taken just downstream of
the Glomar Challenger (or Pennell
Trough) outflow (SecV). In stark contrast to the eastward
section a cold and oxygenated layer of dense shelf water is flowing rapidly to
the northwest with speeds on the order of 0.5 m/s. These sheets of dense
overflow waters are often referred to as overflow plumes and their name
indicates the source water regions (Glomar Challenger
Plume). The Glomar Challenger outflow has one unique
feature. A thin layer of super cooled ice shelf water is located just above the
high salinity shelf water. This water has been melted from the underside of the
The Glomar Challenger (GC) plume
was found during the next several sections on the western side of Iselin Bank
flowing to the north. On the north eastern end of the bank we took a section to
the northeast (SecZ). One can still make out the by
now lower than ambient salinity core of the GC plume with moderate
northwestward flow speeds (~0.2 m/s). The oxygen signal is also much diluted
and one has the impression that parts of the plume have spread out into the
interior of the basin on their equilibrium density level near a depth of 2700m.
But other slightly denser filaments are still near the foot of the slope at
depth exceeding 3500m. These waters will not be deflected to the west north of
Iselin Bank and could already be called Antarctic Bottom Water (AABW). This
branch of AABW ventilates the eastern Pacific sector after is journey to the
north and east following the eastern
The second junction is located near the northwestern end of
Iselin Bank where again the deeper water are able to escape to the topographic
control of Iselin Bank but this time will follow a northeasterly route
ventilating the western Pacific and Indian Sector. A series of sections was
taken to document this flow path in more detail.
The next section of high relevance crossed the slope just
west of the Joides trough (SecS).
Just like in section V we found a cold oxygen rich sheet of dense water flowing
to the north with speeds of about 0.3 m/s. High levels of oxygen were found
down to a depth of 1500m and one would expect continuing sinking downstream. A
series of sections was taken to trace the fate of the Joides
plume. It seems that the shallower parts of this plume can cross Hallett Ridge near the main shelf break and directly flow
towards the west. The deeper parts, however, have to take a long D-tour to the
north and around Hallett ridge. Entrainment along
this much longer pathway will further dilute the plume its signatures were
found on the bottom of the western
A south to north section to the west at about 173W shows the
remnants of the diluted Joides plume at depth below
1600m in the interior (after the Hallett Ridge
D-tour) and a fast westward moving core at shallower depth along the shelf
slope. The shallowest parts of this plume may well be additions of lower
salinity water due to shelf slope exchanges all along the way between the Joides trough and the location of this section. The spread
in the TS diagram gives some tantalizing evidence for this possibility.
The strong velocity gradient in the cross shelf direction
with offshore flow over the shelf and onshore flow over the slope might hold
the key to the formation of the V-shaped front found prominently in this
section over the 800m isobath. Signatures of this
V-shape front were mostly absent in the previous sections where the tidal flows
might be expected to be smaller. This particularly strong flow gradient is most
likely just a snapshot during one extreme of the tidal phases and should not be
mistaken with the climatologically mean condition.
A short section near the western part of the mooring array
just about where the Drygalski Trough overflow begins
(SecD) shows again the typical signatures of newly
ventilated water flowing along the slope. However, during the time this section
was take the modified CDW reached far south onto the shelf. This southward
displacement is also pushing the high
salinity shelf water to the south outside and prohibits its overflow. Thus only
the deep core shows significant westward flow with elevated levels of oxygen
that might not be of Drygalski origin.
The next section just slightly to the west was taken a week
later and showed a very active spill of Drygalski
outflow with very high salinities, cold temperatures and remarkably undiluted
high oxygen levels. The westward flow exceeded 1 m/s and a significant down
slope flow of more than 0.5 m/s were found over the shallower isobath. The input of such large amounts of Drygalski trough water are most likely strongly modulated
by the diurnal tidal currents and its fortnightly beats. Once again the
convergent cross shelf flow lead to the formation of a V-shaped front.
Detailed analysis of some of the individual CTD traces in
the 3 dimensional space revealed an amazing amount of fine structure along the
slope with anomalously high levels of acoustic backscatter recorded by the
LADCP as well as significant vertical velocities.
During AnSlope-2 we were able to capture two events of large
Drygalski outflow and obtained several repeat section
just upstream in the region of the ANSLOPE mooring array. Large variations were
found from section to section and great care should be taken during the final
analysis to account for the tidal modulation.
Downstream of the highly energetic zone we occupied an east
to west section along 71 30S (SecH). Less then 100km
downstream of the Drygalski trough we find the
highest oxygen levels now at a depth range between 1500 and 2000m. The
northward flow speeds are still significant with 0.5 m/s and the Drygalski plume still shows higher than ambient salinities.
We reoccupied this section a month later near the end of the cruise and found
roughly similar conditions in the deep layers, but much less dense water on the
slope above a depth of 1200m. At the foot of the slope in 1800m deep water we
deployed a 500m tall mooring with several temperature and conductivity sensors
as well as one current meter. This locations holds a lot of promise for a
longer term study of the seasonal and interannual
modulation of the Drygalski outflow.
The final two sections (SecI and SecGg) show the downstream evolution of the Drygalski plume. A small ridge just downstram
of Section H forces the plume on a significant northward D-tour and thus we
find it now at a depth of 2200m. But elevated levels of oxygen and the still
higher than ambient salinities leave no doubt about its Drygalski
trough origin. The plume follows the bathymetry to the west and was found just
north of a steep section of bathymetry with increasing speeds of up to 0.4 m/s.
Both sections show shallower and less dense sheets of dense water on the slope,
however, they may not be dense enough to finally become Antarctic Bottom Water.
This tour de force along the shelf break front of the
western
Map: Map of the western Ross Shelf
with the location of all the sections used for the preliminary description of
the hydrographic conditions. All AnSlope-2 CTD stations are shown by a black
dot. Each section is represented by a think black line with a letter code at
its beginning and end.
SecA: AnSlope-2
section using data from the transit to the ANSLOPE core area and matching that
with a later section slightly east of the Drygalski
trough outflow (SecG).
Upper left panel shows potential temperature with a contour
interval of 0.5C (solid) and 0.25 (dashed). Upper right panel shows salinity
with a contour interval of 0.05 (solid) and 0.025 (dashed) above 34.5. The
middle two panels show the west-east and south-north flow velocities as
measured by the LADCP. Contour intervals are 0.1 m/s (solid north/east and
dashed west/south). The bottom left panel shows the dissolved oxygen in ml/l.
The contour interval is 0.25 (solid) and 0.125 (dashed) between 4.5 and 6 ml/l.
The bottom right panel shows all section data in temperature/salinity space
with oxygen colored. All AnSlope-2 CTD data are included as gray dots for
reference. The solid lines reflect surface density and the black dotted line
show the freezing temperature at surface pressure.
Salinity Section: Averaged
northwest to southeast salinity section using all available historical CTD data.
The lines along which the average was performed is given in the map inset. Solid
gray shading denotes the maximum depth and shallow gray dots give the shallowest
depth along the averaging line. The while line is about the shallowest depth
at of the shelf close the the shelf break front. The
location and names of the three major sources of high salinity shelf water are
given.
SecX, SecV, SecZ, SecS, SecG, SecD, SecK, SecH, SecI and SecGg are all following the same template as for section A,
Other Activities
Multibeam: Suzanne Ohara reports that though the ice was extensive for most of
the cruise we were able to add to the regional coverage. We have filled a few data "holes"
in several places. For the most part we
had pretty good coverage from previous surveys and their availability made a
big difference to the station planning.
Multibeam is an indispensable aid
in siting moorings and in understanding the sea floor
morphology control of the circulation and mixing processes.
XBT survey: Andreas Thurnherr
and Alejandro Orsi
organized a XBT survey along 170 W during the northbound transit. Every 10nm an
XBT was deployed and near potential ARGO float surfacing positions X-CTD
stations were interspersed.
1.4
Acknowledgements & comments:
It has been a great cruise! The NBP is a superb ship, staffed with a first rate group of capable and congenial people, across the whole spectrum.
My special appreciation goes to Captain Mike Watson and Captain Robert Verret who have both earned my highest respect. Mates Scott Dunaway, Robert Potter and Rachelle Pagtalunan maneuvered the PALMER carefully and thus ensured a safe journey through the ice. Rachelle’s driving lessons for all of us and Dave Monroe’s tour of the engine room were much appreciated.
Marine Project Coordinator Karl Newyear was always available and of great help in coordinating and safely implementing all aspects of the science operations. Annie Coward, Josh Spillane, Emily Constantine and Jesse Doren spent endless hour near the Baltic room door and handled all deck operations with great care. Mary Hodgins took diligent care of all the chemical and science laboratory equipment. Jeff Otten and Sheldon Blackman ensured flawless operations of the electronic systems and tended to any upcoming issues immediately. Paul Huckins and Kevin Bliss kept the computer systems in good working condition and efficiently tracked down a computer virus that had slipped though the incoming e-mail. Suzanne Ohara looked after the multibeam system and produced a seemingly endless stream of marvelous maps for all scientists and organized the combined humpday and St. Patrick’s Day party, the anchor pool and other social activities.
All members of the science party and Brad Range the Antarctic boy scout of the 2003-2004 season have contributed to the success of the cruise. My special thanks go to Bruce Huber and Phil Mele, who diligently oversaw the CTD operation; and Andreas Thurnherr for his input to the LADCP program. Giorgio Budillon eagerly analyzed the CTD and SADCP data as they were coming in and Ellio Paschini taught us how professionals play foosball. Erin Stone managed to run her own program in addition to her watch duties and Suzanne Rab-Green sampled tirelessly almost all of the 700 CFC samples. Jay Simpkins, Alex Orsi and Kathryn Brooksforce oversaw all mooring operations assisted by Fred Martwich and Brendan Hart. Ana Sirovic and her sonobuy recordings made for good company in the drylab and she organized (and won) the “official” foosball tournament. Bill Libscomb, Maggie Knuth and Deb Thiele and Deb Glasgow spent endless hours on the bridge observing sea-ice and wild life, as well as entertaining any questions on those topics.
Alex Orsi, Ana Sirovic,
Giorgio Budillon, Andreas Thurnherr,
Karl Newyear, Bill Libscomb,
Adding to the science
and the company was the natural beauty of the Antarctic environment. Endless
gigabytes of memory were filled with pictures and short movies culminating in
some spectacular shots of the
2 Program Reports
2.1 CTD/LADCP/Tracer
2.1.1 CTD
(Bruce Huber)
Profiles of temperature, salinity, and dissolved oxygen were obtained using equipment provided by RPSC. The basic package consisted of a Sea-bird Electronics SBE911+ CTD system fitted with 2 sets of ducted conductivity-temperature sensors, dual pumps, and a single SBE 43 dissolved oxygen sensor. The sensor suite was mounted vertically on a flat mounting surface just inboard of the lower frame supports. The sensor pairs generally agreed to within 0.001 for T and 0.010 for C throughout the cruise. A transmissometer and fluorometer were also installed, both with 6000 m depth capability. A PAR sensor with 1000 m depth limit was installed on shallow casts. One-second GPS data from the vessel’s Seapath GPS was merged with the CTD data stream and recorded at every CTD scan. Data were acquired using a PC running Windows 98 and Sea-Bird’s Seasave version 5.30a for Windows software. Raw data was copied over the network to a separate drive immediately after the station. Preliminary post-processing was carried out using batch files and scripts prepared by RPSC and modified by LDEO to provide a variety of CTD products to the AnSlope science party. The processed data was copied to a network disk drive and was generally available within 10 minutes after the conclusion of a station.
All profiles were planned to reach within 10 m of the bottom. Approach to the bottom was guided by a 12 kHz pinger (OSI ) mounted on the frame and an SBE bottom contact switch fitted with a 10 m lanyard and weight. The pinger generally worked well, but required service twice during the cruise to replace the batteries. During many stations, use of the vessel’s thrusters rendered the pinger trace useless. In those circumstances, a call to the bridge was made as we approached the bottom, so they could position the vessel to hold position without thrusters for the final bottom approach. The bottom contact switch gave generally good results, failing to signal only occasionally due to large drifts and bottom currents.
Water samples were collected using a 24-position SBE 32 Carousel sampler with 10 liter water sample bottles of the SIO Bullister design, modified to include a second, larger-bore valve adjacent to the standard sampling valve on the body of the bottle. Water was collected for on-board analysis of salinity and dissolved oxygen. Salinity and oxygen analyses are primarily for standardizing the CTD conductivity and oxygen sensors. Additional samples were collected for later analysis at LDEO of CFC, helium, tritium, oxygen-18. The water sampling system was generally trouble-free. Difficulties experienced on NBP03-02 with sticking sampling valves were not encountered this time. However, it should be noted that we seldom used all 24 bottles, so it is not known whether the problem may persist for more intensive sampling programs. There were no major failures of the carousel system. Only two latch replacements were required to fix mistripping bottles. We experienced a handful of leaking bottle problems due to end cap and air vent O-rings becoming dislodged and consequently not seating properly. The only fix for this seems to be careful inspection of the o-rings just prior to deployment to ensure they are all properly seated.
Cast procedure: the LADCP system was started a minute or two before the ship settled on station. Sometimes this was difficult to judge owing to complications of positioning the ship suitably in the loose pack encountered early in the cruise. The CTD was lowered to a depth of approximately 20 meters where it was allowed to soak until the pump turned on, then for a further period until the oxygen sensor signal stabilized. The soak generally required approximately 5 minutes. The CTD was returned to the surface, the surface readings recorded on the staion log sheet, and the cast begun. At the request of the MTs, the winch payout and hauling rate was 20 m/min from the surface to 30 m, 30 m/min from 30-100 m, and maximum 50 m/min for the remainder of the cast. On approaching the bottom, the winch was slowed to 30 m/min 50 m off the bottom as determined from the pinger/PDR, 20 m/min 30 m off, and 10 m/min for the final approach when 15 m off.
Specific issues:
Station 1: the first cast at station 1 was aborted during the soak because the pressure sensor was not responding. Upon recovery of the package, the oil-filled external pressure port tube was removed, cleaned, and replaced. No further pressure sensor problems were encountered.
Stations 49-51: taken during rough seas, these stations all exhibited data spiking. After CTD 51, it was determined that the cable had been damaged near the end termination. One of the outer armor wraps had become loose for approximately 15 meters from the end termination to the winch. The wire was cut back and reterminated, and the data were spike-free thereafter until much later in the cruise.
Stations 1-144: excessive spiking in the computed salinity data could be corrected only by applying a very long sensor time constant correction (nearly 1 second). It’s abnormal for such a long lag to be required, so we investigated the sensor plumbing. We discovered that the pump used on the primary sensor suite had only half the flow rate of the secondary pump. This was determined by removing the pumps and timing how long it took each to fill a large ehrlenmeyer flask with fresh water on the bench, with the pump submerged in a bucket as a reservoir. It was later confirmed that the primary pump installed for our trip was the wrong model, one specifically designed for low flow applications such as moored Seacats. The pump was replaced with a proper model, and the primary salinity data spiking problem was alleviated. All temperature/ salinity data reported for this cruise will be derived from the secondary sensor suite. The oxygen data is from the primary sensor only (there is no secondary oxygen sensor). A preliminary look at the oxygen data shows no significant difference between the data collected with the slow pump and that collected after ctd 144 with the new pump. This is most likely due to the oxygen sensor’s time constant being several seconds and so much less sensitive to the different flow rates. This analyses will be repeated more carefully in the data post processing phase.
Stations 190-194: spikes developed in all sensor data on station 190, with increasing frequency on succeeding stations. The spiking at first seemed to be related to lowering rate. A similar problem had been encountered on NBP03-02, which was resolved then by replacing the slip rings. The slip rings were replaced this time after station 192, but the problem persisted. Moreover, the spiking was confined to depths below 3000 m, but still speed dependent. Lowering and hauling rate was varied on CTD 194 to confirm rate dependency of the noise. Since the remaining casts were all less than 3000 m, no additional measures were taken to solve the problem while data collection was still ongoing. The cable was not reterminated after CTD 194, but upon inspection, it was found that the pigtail between the em cable and CTD had two splices in it, and the cable was not well secured against vibration. The pigtail was tested by flexing, pulling and bending with the CTD powered up, but no intermittencies were detected. The pigtail was then resecured to prevent vibration and flexing during subsequent casts.
It was felt that the remaining cruise objectives could be met with the system as is, and with stations very close together the decision was made not to reterminate the wire. After the ctd program finished, the cable was tested via TDR. No obvious problems were detected, but the testing was inconclusive because the TDR could not find the end of the cable. The cable was reterminated in anticipation of a possible deep test cast during the transit to NZ. The deep cast was not possible due to lack of time, and underway maintenance of the bow thruster.
2.1.2 Lowered Acoustic Doppler Current Profiler (LADCP)
(A. Thurnherr, M. Visbeck, and B. Huber)
The LDEO LADCP system comprises 2 RDI WH300M ADCPs in deep pressure housings mounted on the CTD frame,
one looking up and one down, connected to an external battery housing designed
and fabricated at LDEO. The two heads
are operated in master/slave mode, with the downlooking
head serving as master. The
synchronization signal, communications lines, and power lines are served to the
heads and battery pack via a breakout cable designed at LDEO and manufactured
by Impulse. Preliminary processing was
performed immediately following data download using the LDEO LADCP processing
software built and maintained by M. Visbeck.
The LADCP system underwent several revisions and upgrades during the cruise. Initially the precast setup and postcast data download were handled by RDI DOS-based software and DOS batch files running on a Dell Latitude computer with Windows 2000 operating system. The post processing software is Matlab-based, and was initially run on the Dell using Matlab 6.5R13 under Windows2000. The netcdf library installed evidently has some problems, so the post processing output was provided as .mat files rather than netcdf files. As software revisions were made by M. Visbeck, the stations were reprocessed on his Powerbook, and a cruise netcdf file was produced and updated throughout the cruise. The processed data was placed on a web site accessible from the NBP intranet web.
Visbeck LADCP processing software version 8b April 2004
All AnSlope-1 and AnSlope-2 LADCP data were processed with a MATLAB based software written mostly by Martin Visbeck and can be obtained from: http://www.ldeo.columbia.edu/~visbeck/ladcp
Version 8b has several minor changes and a few more significant differences between the flavors of version7. The “common” m-files are grouped together, while “local” m-files are organized under a separate heading that need to be adjusted for each particular cruise.
Furthermore, the weighting of the inverse solution has been altered after a number of helpful discussions with Andreas Thurnherr. The most significant change was that version 8 uses the bottom track data to constrain the U_ctd velocities. All previous versions used to directly constrain the U_ocean estimates over the range that bottom track data are available. Significant changes were also made to the implementation of the drag model, but it still should be considered experimental and is turned off in the new default settings. A new constraint was added that allows one to restrict the energy projected to any integer vertical mode (ps.smallfac). For very deep profiles this reduces “runaway” shears due to the expected random walk of shear errors. This constraint is enabled in the default mode at very low influence. The data loading function (loadrdi.m) was changed in several small ways. The most significant change is that the construction of bottom track data from the water profile data was moved to a dedicated routine (getbtrack.m) which also saves all bottom track data for later consistency check. Finally, version 8 has full support of RDI beam coordinate data.
The other significant change is a more elaborate scheme to detect any time offset between the CTD and LADCP data (loadctd.m).
The structure of the LADC processing was as follows:
A wrapper m-file was constructed that allows processing of the whole cruise (ladcpbatch.m). This means that it is not anymore necessary to have one m-file for each station and enables reprocessing of all profiles.
First the input files names for each cruise were assigned in the f-structure: One for each up/down looking ADCP, a CTD-time series file, a navigation time series file (same as the CTD time series file in our case), a CTD-processed profile file and the SADCP profile file name.
Second some cruise specific default parameter were given, such as the vertical resolution of the output (ps.dz=10 [m]).
Then the main LADCP processing was initiated by calling LAPROC. The following main task are performed:
1) LOADRDI: load ADCP data and merge up-down looker into one matrix
2) GETSERIAL: assign serial number to instrument from either the deployment log file or a locally provided lookup table that decoded the CPU board serial number.
3) LOADNAV: local file that encodes ship’s navigation and provides the position as a function of time. Note this function assumes that the ADCP and Navigation time are “the same”. The mean station position gets calculated and the magnetic deviation calculated and applied if not explicitly given prior to the call of LOADRDI
4) GETBTRACK: checks the RDI provided bottom track and makes a secondary bottom track based on the water track data. The primary bottom track to be used can be chosen and both are saved for later diagnostics.
5) LOADCTDPROF: local file to load the processed CTD data file and to calculate the sound speed profile as well as the ocean stratification.
6) LOADCTD: local file to load the CTD time series. Then a W_ctd gets calculated from dz/dt and gets compared to that of the ADCP. A number of different tests are performed to determine the best time lag between CTD and ADCP profiles based on the W time series comparison. Then the ADCP time is adjusted to match the CTD time series. This choice is justified if the navigation data are provided via the CTD time series. If the navigation is external one might want to adjust the CTD time stamps….
7) GETDPTHI: calculates the water depth from bottom track distance and ADCP depth time series (either based on time integration of W or preferably the CTD pressure/depth time series).
At this point a plot of some of the engineering data is made and LAPROC calls the second batch of processing files given in PRESOLVE:
1) PREPINV: condenses the raw data into a largely reduced number of “super ensembles” which we chose to collect all consecutive data over a 10m depth interval. Prior to the averaging both velocity records get rotated to a common heading base which was selected to be the average heading between down and up looking instrument.
2) LOADSADCP: load sadcp data that were provided by the on-board real time processed hull ADCP data (150kHz). For this cruise a special set of commands were implemented to generate a MATLAB file automatically every hour.
3) LANARROW: is a set of calls to give a first estimate of the solution and then remove 1% of the most inconsistent data
4) A second call to PREPINV adjusts the up/down looking instrument further. First the preliminary estimate of the ocean velocity profile is removed from each raw ensemble. What remains are nbin realizations of U_ctd which should be the same for both instruments and all bins. For each instrument one range averaged mean offset is calculated and removed from the raw data. This reduces the offset between the two heads and could be interpreted as a tilt/compass error. Then the super ensembles are recalculated.
At this point all data are load and screened and ready for the final processing steps collected in RESOLVE:
1) GETINV: sets up the inversion and performs the solve. A number of changes have been implemented with regards to the weighting of the various constraints. Also a table of the strength of each of the possible constraints is produced.
2) CHECKINV: graphically displays the relative contribution of each constraint to the two solutions (U_ocean and U_ctd). It also lists the expected certainty and the actual difference between the constraint and the solution.
3) CHECKBTRK: performs an assessment of bottom track biases between the RDI and water track derived bottom track.
4) GETSHEAR2: performs the classical shear based solution and matches the vertical mean flow velocity with that of the full inverse solution.
5) GETKXPROF: is an experimental implementation of the Polzin-Gregg-Haney method to compute vertical diffusivities from the internal wave shear spectra. This method is not fully tested and should be take as “experimental”
6)
7) SAVEARCH: makes MATLAB, ASCII and NETCDF output files
8) SAVEPROT: saves some of the most salient information about the processing
The cruise batch file ends will a call to CRUISE which reads all individual NETCDF files and generates one single NETCDF file for the whole cruise as well as series of html index files and table to allow fast browsing of the results.
Finally we saved 14 plots for each cast:
1) Main ocean velocity profile plot plus a number of additional plots: velocity error, range, target strength and CTD trace position.
2) Raw data plot. Version 8 had now the correct ADCP voltage and computes ranges for each beam.
3) Detailed results of the inversion: left panel is the un-attributed velocity as a function of bins and super ensemble velocity. This plot should be “white noise” with an rms of the super ensemble error. Any structure points to poor performance of the inversion. Middle panel plots each super ensemble ocean velocity estimate (color) as a function of depth and time. The detected bottom is given by black dots. One expects this plot to show horizontal stripes of one color. Vertical stripes point to poor performance of the inversion (tilt, compass, bottom track issues). The right panel is similar to the middle panel except that it plots a dot for each single ocean velocity bin (black up looker, blue down looker). The green line give an estimate of the uncertainty. The red line is the results from the inversion, the black line is the result form the shear profile (if available).
4) Top panel is the beginning / end of the cast in time/depth space. Blue dots represent surface detection. Middle panel is the bottom of the cast with the black line the time integrated W, the red line the best estimate of Z(t) (CTD-depth is available) and the blue dots are the distance of the bottom. The black line is the best estimate of the bottom at the deepest point of the CTD. The lower left panel shows the CTD depth as a function of time if CTD – pressure is available. The lower right panel shows a few sample W time series after the time adjustments between CTD and ADCP time series have been performed.
5) Shows the difference between the up/down looking compass. Top line is the compass “adjustment” applied. Middle panel is the difference between the compasses. Bottom panel is the rotation needed to best match the reference velocities between each instrument.
6) Heading, pitch and roll difference between the up/down looking instrument as a function of the down looking heading/pitch/roll.
7) Top panels time series of U_ctd, U_ocean at depth of CTD and U_ship (from ships navigation). If ps.dragfac>0 a red line shows the expected U_ctd from the drag model. Left middle panel horizontal distance of CTD from ship. Middle righ panel W-CTD. Bottom panel show position of CTD and ship relative to starting position.
8) Vertical diffusivity profile (not fully tested)
9) Top U/V ship board ADCP profiles within the CTD cast time. Bottom ships position and where SADCP profiles were taken.
10) Top Mean U velocity offset applied to reduce up/down looker difference. Middle same as top for V velocity. Bottom: implied tilt error it the difference was due to false projection of W into the U/V component.
11) Brief summary of the most disturbing errors/warning encountered during the processing. Meant to guide the data collection and notify the operator about potential issues.
12) Weights used for the inversion: Top panel weight used to constrain U_ocean. Bottom panel weight used to constrain U_ctd. One would like to see mostly velocity data and only a few extra constraints.
13) Performance of the bottom track: Upper right U velocity. Black dots represent U_adcp – U_ctd from solution for profiles where bottom track data are present. Red dots mark bin range that was used to make water track data. Below that green histogram of U_brk_RDI – U_ctd that should be think an with a 0 bias. Middle same for bottom track made from water pings (own). Bottom super ensemble bottom track data (could either be own or RDI [default]). Upper left same as upper right for V component. Left bottom same as Upper left except for W component. Right bottom plots abs(W) normalized by the reference layer W and shows the expected low bias for bins “below” surface due to the expected larger beam angle for bottom returns of the center of the beams.
Linux LADCP software (A. Thurnherr)
At the start of the cruise RDI Windows
programs were used to program the ADCPS and to download the data after each
cast. This setup had several disadvantages, the main one being that data
downloading did had to be slowed down to 57kbps instead of the maximum speed of
115kbps. Additionally, the two instruments were connected to the PC using a RS232
switch, which meant that only one instrument could talk to the computer at the
same time. Because of good experiences last year on the Aurora Australis A0304 cruise, when full transfer speeds were
regularly achieved using a PC running FreeBSD and kermit,
it was decided to test a similar setting.
Because no kermit
was available on our cruise a replacement for RDI's BBTALK
was implemented in perl. The program, called bbabble, is capable of talking to two instruments in
parallel (using two separate colors to avoid confusion). The main advantage of
having a single terminal program talking to two instruments is that downloading
can proceed from both instruments in parallel. Initial tests confirmed that the
full downloading speed of 115kbps is achievable under UNIX when downloading from
both instruments in parallel and using a laptop. In practice, a speedup factor
of 3.5 (compared to the RDI Windows programs) was realized. The program was
tested under MacOSX and Linux. Since FreeBSD is more
stable than either of these, bbabble will be adapted
to run under that operating system as well.
In order to connect the downloading PC to
two RS232 devices at the same time, we borrowed two USB-to-RS232 converters
from Raytheon. The converters used (Keyspan USA-19QW)
worked perfectly both under MacOSX (using the
original Keyspan driver) and under Linux (using a
driver that is part of Linux). An added advantage of the Keyspan
converters is that they have status lights, which helps solve communications problems.
We also tried a different USB-to-RS232 converter for which a Linux driver was
available. However, this converter did not work --- some tests suggested that
it does not seem to be able to send a BREAK, which is required to wake the ADCPs. No USB-to-RS232 adapter is required for bbabble to work, however, as the instruments can also be connected
directly to the computer's RS232 port(s).
An additional, unexpected, benefit of bbabble is that it appears more robust than BBTALK in
waking up instruments. The instrument used for testing has the property that it
often does not respond to the BBTALK wakeup. During several days of development
and testing, the same instrument did not fail to respond to a single BREAK sent
to it from MacOSX or Linux. The reason may be
different BREAK characteristics --- the timing of the RS232 BREAK condition is
not well defined and can be chosen in UNIX (using the termios
tcsendbreak() routine). The default value (the BREAK
condition lasting between 0.25 and 0.5s) worked well for us.
Replacement scripts for the remaining RDI programs (e.g. to erase the memory, send a command file, list the contents of the recorder, etc.) were written using the expect programming language, which is an extension of TCL. While its syntax is somewhat clunky, expect was designed exactly for the purpose of interacting with an interactive system (the RDI workhorses, using bbabble). In particular it is ideally suited to catch error messages and handle timeouts and retries. The new UNIX system was used for somewhat more than half of the casts and appears to be stable.
The Dell computer being used developed some problems which we thought were heat-related, manifested by the screen going blank and the keyboard becoming unresponsive (including the power button). When this happened, the only way to revive the computer was to disconnect power, remove and replace the battery to completely hard-reset the computer. We borrowed a Compaq notebook computer from RPSC, but it had no serial port, only USB. We produced a dual-boot disk drive in the Dell, swapped that disk with the Compaq, and ran the system under Linux on the Compaq. The disk swapping was facilitated by having a disk cloning kit manufactured by Apricorn, with several spare hard drives. Thus, we were able to preserve the original Dell disk, clone it to produce a dual boot system, and later, with our third spare drive, produce a Linux-only disk.
The Dell was disassembled to see if we could diagnose the shutdown problem. During the disassembly, it was given a thorough cleaning. Upon reassembly, the shutdown symptoms disappeared. After thorough testing under Windows, the Linux disk was installed and the Compaq returned to RPSC.
Several different instrument setups were used during the
cruise. Initially, for casts 1-35, single ping ensembles were used. For casts 36--39,
3-ping ensembles were tried but this led to mutual interference by the
instruments and we reverted to single pings for cats 40--66. After solving the
synchronization problem (by lengthening the ensemble time) 3-ping ensembles
were used for casts 67--224. For casts 225ff the LADCP feature was replaced by
the Bottom-Tracking feature in the downlooker. In
casts 225--226 ensembles consisting of one BT and one WT ping were used. During
the remainder of the casts, the downlooker averaged
1-BT/3-WT pings per ensemble. Because of an oversight, the uplooker
remained in single-ping mode (1 ping per 4 seconds), which did not significantly
degrade the resulting velocity profiles, however.
A note on timing:
during the final tests with the true BT mode it was discovered that after the
command TE00:00:03.5 the ensemble time is 3.05s (instead of 3.5s as intended).
Using TE00:00:03.50 solves that problem. It is likely that at least some of our
initial syncronization troubles are related to this
quirk.
Once we entered deeper water some of our profiles began
deteriorating because of short instrument ranges. It was noted that in cast 175
most of the downlooker data in bin 1 was rejected.
Suspecting ringing, the blanking distance was doubled to 10m for cast 176 and
177 but the same behaviour occurred. We then decided
to try a setting first suggested by John Church on the Aurora Australis cruise A0304, namely to set the blanking distance
to zero and always discarding the data in the first bin. This solved the
problem (i.e. the data in the first bin after this change are as good as those
in bin 1), and it appears that our subsequent casts in deep water were less
plagued by range problems. Whether this holds up in different locations remains
to be seen.
Additional Considerations and Findings (A Thurnherr, M. Visbeck)
Firing's Software and Shear Inversion
Processing the LADCP data with Firing shear-calculation software augmented by Thurnherr's shear inversion was not pursued vigorously because it seems that little is to be gained from this. Visbeck's velocity inversion has several inherent advantages and initial inspection of the profiles has shown only few profiles where Visbeck's shear and inverse solutions are significantly different, implying uncertainty. Processing those casts with Firing's software or by using the shear-inversion method does not yield more consistent solutions. The main inherent advantages of carrying out the inversion with velocity (rather than shear) data are that a bad velocities (in contrast to a bad shear) do not introduce spurious shear into the solutions. Furthermore, the separation of the measured velocities into CTD and ocean components allows for simpler treatment of the BT data, which directly constrain the CTD velocities. Additionally, the velocity separation allows for a potentially useful additional constraint of the instrument motion using a drag model. The drag model that is currently part of the Visbeck's inversion should be considered experimental, however.
Some modifications to Firing's programs were required in order to get them to work with a dual-headed RDI system. (The uplooker code was only in place for Sontek systems.) Additionally, several bugs were corrected. In Firing's design shear editing of the two heads is done separately and the shears are combined when the absolute velocity profiles are calculated. The shear-inversion was updated to allow simultaneous processing of the down- and uplooker shears. This was easy to do but did not lead to marked improvements, as the shear of most casts was well determined by the data from a single head. At least in some of the cases where the down- and upcasts disagree significantly, the disagreement is confined to a single head and data from the other head can be used to process the cast (see also section on wakes below).
One disadvantage of previous versions of the shear inversion was that the GPS data could not be used. It was argued by some users that since GPS data are highly accurate (the largest errors often being related to the lateral offset between the GPS antenna and the CTD wire, and the change of heading of the ship while on station) the GPS constraint should be trusted more than either the BT or the SADCP constraints. There are problems with this argumentation, however. First, the different data constrain the LADCP profiles in different ways: the BT and SADCP constraints fix the bottom and top portions of the LADCP profiles, respectively; the GPS constraint, on the other hand, sets the depth-integrated velocities. It is this constraint that forces bad profiles with runaway shear to take on the characteristic X-shape. A second problem with the argumentation that the quality of the GPS data immediately leads to a tight constraint of the barotropic velocity is that in order to calculate the latter the integrated horizontal motion of the LADCP relative to the water during the cast is required as well. Nominally, this uncertainty is small, typically of order 1mm/s in case of our casts. (Since the variance of a sum is the sum of the variances the positional uncertainty grows with the square root of time. The corresponding uncertainty of the mean velocity is therefore approximately the single-ping velocity uncertainty divided by the square root of the number of pings in a profile. With a 1-hour profile, 1.5s ping interval, and a 5cm/s single-ping accuracy the nominal uncertainty is 1mm/s.)
In practice, the uncertainty is significantly larger, however, at least in part because there are gaps in the velocity data (e.g. when the downlooker is close to the sea bed and when the uplooker is close to the sea surface). Having a dual system available allows the uncertainty to be determined a-posteriori by comparing the barotropic velocities of the down- and the uplookers for any given cast. Figure [barovel_errors_vs_gaplen.eps] shows the barotropic-velocity differences between the uplooker and downlooker data plotted against gap length for casts 1--166, excluding stations with instrument problems. As expected there is a correlation between gap length and velocity uncertainty but in the case of our casts the velocity uncertainty never drops below 1cm/s. The average depth of the casts with gap length below 8% is 1900m and the corresponding velocity uncertainty is 1.3cm/s. This is twice the uncertainty of the corresponding GPS velocity uncertainty with an assumed positional accuracy of 30m and a winch speed of 50m/min (no bottle stops).
If it is optimistically assumed that the trend shown in the figure continues to shorter gap lengths, rather than reaching a plateau near 1cm/s, the GPS error does not dominate the barotropic-velocity estimates except for casts deeper than 4000m or so. If a plateau is reached, on the other hand, the GPS uncertainties never dominate the uncertainties in the barotropic velocity estimates and at least the BT constraint is easily as accurate as the GPS constraint.
A further modification to the shear inversion concerns the weight of the BT constraint. In the previous version (the one released after the Aurora Australis cruise in 2003) the BT constraint was weighted as if there was an independent velocity estimate at each depth in the BT-referenced velocity profiles. (If the BT-referenced profile spanned 100m and the vertical resolution was 10m the BT data were weighted as if there were 10 independent velocity estimates near the sea bed.) This is incorrect, as the BT data really only provide a single velocity estimate, i.e. the package velocity over ground. It is nevertheless useful to impose the BT velocity constraint over a range of depths so as to minimize the influence of the shear uncertainty near the sea bed. Therefore, the BT constraint is applied over the entire BT-profile depth range as before but it is downweighted by the square root of the number of samples in the profile.
Unfortunately, this is still not the correct way of handling the weights, as the standard deviations (and standard errors) of the BT-referenced profiles are dominated by the uncertainties in the WT data and not by the uncertainties of the BT data. (This was noticed when the BT profiles from the casts with the true BT mode were compared to earlier ones and it was found that the standard deviations were the same even though the BT accuracy with true BT pings is nearly an order of magnitude higher than the corresponding accuracy when using BT from WT pings --- see Bottom-Tracking section below).
The changes to the shear inversion are poorly documented, not tested extensively and need significant extra work. No public release is planned at this stage.
Instrument Wake and X-Profiles
In a few cases (part of) the upcast of the downlooker is contaminated by shear that is most likely caused by the wake of the CTD platform. The wake contamination is most easily apparent in the left panels of figure 3 where the inversion-residuals are plotted [a210_3_wake.ps]. The corresponding velocity profiles are of comparatively poor quality, as indicated by the disagreement between Visbeck's shear and the inverse solutions [a210_1_wake.ps]. In most wake-affected cases this disagreement is noted by the software and a specific warning is output on figure 11. We observed wake problems most often in the downlooker data but there is at least one cast where a portion of the uplooker downcast is contaminated, although without significantly reducing the consistency between the shear and inverse solutions.
Figure [a210_3_wake.ps] suggests that the wake contamination is largely restricted to the first two bins. This assumption is also made in Firing's software, which, in contrast to Visbeck's inversion, contains specific code to handle wake contamination. Strictly speaking, Firing's wake-editing can be configured to remove data from as many bins as required but it defaults to 1 and the recommended value (from the demo) is 2. Unfortunately, the instrument wake does not only contaminate the first few bins but, in our cases, all bins up to the range of the instrument. This was tested by successively removing one bin after the other and re-processing the data --- only when all bins are removed does the shear and inverse solutions become consistent [Fig a210_1.ps]. This is troubling for single-head LADCP casts because it implies that all data from the affected beam have to be discarded and that 3-beam solutions have to be used. Currently, this is not possible either in Firing's nor in Visbeck's software.
In order to check the effectiveness of Firing's wake editing, the data from a wake-affected station were processed using the recommended wake-editing settings (min_wake_w= 0.1; wake_hd_dif= 20; wake_ang_min= 15; n_wake_bins= 2). While the velocity profile from the uplooker [Fig 210up] is not a particularly good one, judging from the down- vs. upcast consistency, it is nevertheless approximately consistent with Visbeck's inverse solution within the error bars. The downlooker solution [210down.ps], on the other hand, is a characteristic X profile. This suggests that at least some of the bad profiles observed elsewhere may be caused by wake contamination as well.
Potential Bias in Post-Processed BT Data
There are three methods for getting bottom track data from RDI Workhorse ADCPs (in order of decreasing expected accuracy): using dedicated bottom-track pings, from water-track pings processed by the instrument (RDI BT-from-WT data), and by post-processing regular water-track data. As long as none of these methods has any bias they are equally useful, because the accuracy can be increased more-or-less arbitrarily by adding bottom-tracking stops (as was done during the Aurora Australis cruise A0304). Assessing whether there are biases is difficult because such biases would most likely be a function of the speed of the instrument over ground. In the case of our data set there are some casts where the instrument was towed near the sea bed (because the ship had to drift with the ice) but those casts are also characterized by comparatively few BT data. In these casts the uncertainties, especially of the post-processed BT data, are too large to determine any bias by direct comparison with the BT-from-WT data.
However, there are indications for potential bias in the BT data determined from post-processed WT data. The top right panel of Fig.2 in Visbeck's inversion paper (JAOT, 2002), for example, shows large (of order 10cm per 10m) shear in the horizontal velocities near the sea bed, implying that the exact location of the seabed (within a bin) can have a significant effect on the resulting BT velocities. Bias in BT data from post-processed WT pings is a problem because a BT-from-WT mode is only available for the 300kHz Workhorse but not for the 150kHz RDI ADCP used by other groups. (Using dedicated BT pings has other disadvantages as discussed below.)
Because of the potential bias problem it was decided to investigate the velocity shear near the sea bed in more detail. In the top right panel of figure [w-bias_224.pdf] the normalized BT-referenced vertical velocities of cast 224 are shown. (Vertical, rather than horizontal velocities are used because of the comparatively larger signal.) The velocities observed when the instrument was more than 120m above the sea bed are plotted in green, the velocities observed when the instrument was below 70m are shown in red and the remaining velocities are colored blue. At and especially below the sea bed there is a strong shear, which increases with decreasing distance from the sea bed. Velocities below the sea bed are determined by late arrivals, i.e. by sound energy in the ``outer'' side lobe scattered by the sea floor farther away from the instrument than the main beams. Since the acoustic paths in this ``outer'' side lobe are angled less steeply than the nominal beam angle the apparent vertical velocities below the sea bed are biased low. In contrast, the energy from the ``inner'' side lobes arrives early and contaminates the bottom part of each profile (15% in case of a 30-degree beam angle). In some of the profiles (only weakly in the one shown) the contamination from the ``inner'' side lobes introduces a high bias in the vertical velocities immediately above the sea bed. The solid lines show the expected shear calculated from simple geometric considerations, supporting the hypothesis that the shear is due to sidelobe contamination.
Because of the geometry the side-lobe-related shear in the horizontal velocities near the sea bed is more pronounced than the corresponding shear in the vertical velocities. However, presumably at least in part because of the smaller signal, the pattern is much less clear in the data. It will be noted that the velocities measured at the level of the sea bed are unbiased. If the distance to the sea bed is known accurately, unbiased BT velocities can therefore be derived from WT pings. This is easier to do before the velocity data are binned, which is presumably the reason why the RDI BT-from-WT data are less noisy than the post-processed BT data. In any case, the bias can be minimized if BT data are collected as far away from the sea bed as possible --- it may therefore be advisable to implement a BT stop at some distance above the sea bed, as was done during the Aurora Australis A0304 cruise.
Using Dedicated Bottom-Tracking
In order to compare the different methods for determining BT velocities RDI kindly provided a BT upgrade for one of the LDEO instruments. Because of some uncertainty regarding the synchronization of Workhorses without LADCP mode (the LADCP feature has to be de-installed before installing the BT feature) the trials were carried out toward the end of the cruise on stations 225--232. These casts were all executed in heavy ice where it was not possible to tow the instrument, i.e. the BT velocities were too small to determine whether there is a bias in any of the methods. Nevertheless, the experiment proved interesting.
For the tests the uplooker was left with the LADCP upgrade installed. Synchronization between the uplooker and the downlooker (with BT instead of LADCP feature) worked exactly the same as synchronization between two instruments with LADCP features installed. Both instruments used firmware version 16.21.
Figure [BT_stats.eps] shows the median fluctuations of successive BT speeds. BT-track data were collected in 3 different configurations: from single-ping WT data using the built-in RDI BT-from-WT mode (red), the same from 3-ping ensembles (blue), and from single BT pings (purple). High median fluctuations are presumably caused by true instrument accelerations. The lower bounds in each configuration are determined by the velocity uncertainties; consistent with this assertion, the three-ping BT-from-WT uncertainties are approximately 1.7 (square root of 3) lower than the corresponding single-ping uncertainties. The uncertainties associated with true BT pings are nearly an order of magnitude smaller than the corresponding single-ping uncertainties from WT data, suggesting that using BT pings is potentially very useful for collecting LADCP profiles.
There are three disadvantages to using BT pings, however. First, BT pings increase power consumption --- our data do not allow a detailed assessment of this effect, however. Second, the interleaving of BT and WT pings reduces the available amount of WT data. This can be alleviated to some degree by combining single BT pings with several WT pings in a single ensemble. We used 3-WT+1-BT ping ensembles for all but the first two of our true BT casts. When doing this the time lag between the BT and the WT data can become an issue, however, especially in rough seas. Because our test casts were done in heavy ice it is not possible to assess this effect from the available data. However, lag correlations between w (dz/dt) calculated from CTD and BT data, and from CTD and reference-layer WT data of the single-ping test casts show offsets of 0.3s and 0.8s, respectively. While it may be possible to temporally interpolate the BT data to match the times of the WT data this was not tested.
Another potential way of reducing the number of BT pings without having to resort to multi-ping ensembles consists in using the RDI BD command, which suspends the generation of BT pings for a number of ensembles when no bottom is detected in a given ensemble. While this command is described in the RDI manual it does not appear to be implemented, however --- the LDEO Workhorses return an unknown-command error.
Specific issues:
CTD 1: Initial configuration was sn 150 as master, sn149 as slave. The master came back after the cast with no data. During bench test, the unit failed the TRANSMIT sequence of the test, and the beam continuity check for beam 4. The unit was disassembled and found to have a loose cable between one of the circuit boards and the head. Unit was reassembled, tested again. This time is passed the TRANSMIT test, but failed the beam continuity test.
CTD 2: sn 149 slave, sn 754 master. Processing software reported a weak beam 3 for the master. Reinstalled sn150 as master.
CTD 3: sn150 had trouble waking up for cast initialization. Post processing reported weak beam 4 (range of 145 vs 175 for the other 3 beams). Changed heads for subsequent casts: sn 754 slave, sn149 Master. Will return sn 150 to RDI for repairs.
CTD 4: processing software reports possible weak beam 3 on sn 754. This was later determined to be a non-issue, as even the weaker beam had excellent range.
CTD35-67 - experimented with various combinations of ping/sync and ensemble settings to reduce data file size and retain good data. Settled on 3 pings per ensemble, 3.5 sec/ensemble, 0.9 sec per ping.
2.1.3 Salinity Determination (Autosal)
(B Huber)
Water sample salinity was determined using the RPSC Guildline Autosal 8400B laboratory salinometer(number 59-213) , standardized with batch P141 standard water from OSIL. Data from the autosal was captured by computer using an interface and software constructed at Scripps Oceanographic Inst. The salinometer is housed in a temperature-controlled enclosure constructed in the Bio Lab. The room temperature at the level of the salinometer is reasonably well controlled, but we found on last year’s cruise NBP03-2 that there was a nearly 5 degree gradient between the deck and the autosal level. Samples to be run are stored on the deck, and so were not equilibrating to near the salinometer bath temperature, causing some noisy runs. The fan we had installed last year to minimizing the floor-to-ceiling temperature gradient was no longer in the autosal room so another was requested from the MST and installed. In order to speed sample processing, sample crates were placed in the aft dry lab sink immediately after drawing the samples, and the crates filled with tap water. Water was changed 2 to 3 times over the next few hours, and the resultant water bath temperature checked with a thermocouple probe provided by RPSC. This procedure stabilized the sample temperatures to around 20ºC within 6 hours and greatly improved the stability of the runs. Overall the system works very well. The combination of SIO interface and software, temperature stability, and excellent maintenance of the autosal yielded very low drift rates, and good repeatability of replicate samples. A peristaltic sample pump was found among the Autosal spares in the cabinet of the autosal room, so we requested early on that it be installed. Thanks to the MST, ET and MT’s, the pump was up and running in very little time, with a new sample platform constructed and installed by the MTs. The external pump greatly simplifies sample handling and speeds the throughput of samples by approximately 20 percent. One pump developed a leak and was replaced by a spare unit. It is highly recommended that these pumps be permanently installed and sufficient spares kept on hand. They make the autosal runs much more efficient. We also suggest that the room temperature sensor be relocated. It is currently coiled and attached to the housing of the HVAC unit. It would be better placed on the opposite wall to better measure the ambient temperature near the autosals, rather than the temperature near the HVAC unit. The samples were drawn by G. Budillon and E. Paschini, and run by S. Rab-Green and E. Paschini.
2.1.4 Dissolved Oxygen Titration
An SBE 43 dissolved oxygen sensor was connected to the primary CTD sensor array. 513 oxygen samples were collected for Winkler titration on 91 stations. An amperometric titrator, designed by Dr. C. Langdon, was used to titrate whole aliquot samples. The titrator ran smoothly, with two exceptions. A tube rupture inside the electronics box resulted in a titrant leak, causing an electronic malfunction. The rupture was repaired and the spill cleaned, after which the titrations ran properly. Also, at a later time, the stepper motor malfunctioned and was swapped out for an RPS spare, after which titrations proceeded without incidence. A preliminary correction was applied to the CTD oxygen values based on delta oxygen, yielding close approximation to the rosette bottle data.
2.1.5 CFC-sampling
(S. Rab-Green)
Procedures for collecting samples according to B. Smethie at Lamont were followed.
Collecting:
To collect the water samples from CTD rosette, 50ml glass
ampoules with attached tees were used. A
metal tee was connected to the ampoule neck and was hand tightened to fit. Tees
were attached to ampoules before sampling and kept in this pre-sampling position
in a tray. For collecting, the movable tube of the tee was connected to the
petcock via an adapter to the niskin. By opening the
valve of the niskin,
water flow was started. The water was allowed to flow through ampoule for about
30 seconds( entering via moveable tube,
flowing out via stationary tube of the tee).
While flushing, the movable tube was slid up towards the
ultra-torr nut and then secured. The stationary tube
was capped while water was still flowing. After removing ampoule from niskin, also the movable tube was capped. These steps were
repeated for all ampoules. CFC samples were taken from niskins,
before any other samples were taken. Sealing procedures were followed as soon
as possible after collecting.
Sealing:
After removing cap, stationary tube was connected to the
needle valve with nitrogen flowing. By removing the cap of stationary tube,
water in the tee was removed by nitrogen.
With nitrogen still flowing, the moveable tube was moved up into the
ampoules neck, replacing the water by nitrogen. The water level had to be just
below the gold band. With torch, the neck of ampoule was warmed up just above
the gold ring. One spot was heated around the ampoule neck by rotating the
torch until glass was glowing. By pulling gently, the ampoule was separated
from the top part by heating it briefly again to create smooth seal. After
ampoules have cooled, the seal was checked by inverting the ampoule to see if
there were leaks. Finished ampoules were labeled appropriately, tips wrapped in
tissue paper and packed in original boxes.
Notes:
-In some cases where ampoules could not be sealed
immediately, they were stored at 0C for up to 4 hours.
-Some ampoules were lost by falling out the niskins while filling with water. This was caused by movement
of the ship. Not all niskin petcocks were exactly identical
in diameter and adapters didn’t fit tight enough to avoid slipping out.
- A few ampoules containing samples were lost by bad seals
(6), mainly caused by strong movements of the ship through the ice.
- 720 samples were taken, from a total of 87 stations.
Sampling sizes ranged between 1 and 18 ampoules per station , depending on the
depth of CTD.
2.1.6
Transient Tracers (He, Tritium, 18O)
Samples were drawn on select stations for helium, tritium and oxygen-18, following written procedures provided with the sampling materials. The samples were drawn by B. Huber and A. Thurnherr, both with minimal previous experience. Some breakage of empty tritium sample bottles occurred in transit to the ship, reducing the number of available bottles from 210 to 205. There were 207 oxygen 18 bottles provided, and 216 helium tubes. The samples will be shipped back to LDEO for analysis.
2.2 Moored Current Meters and T/C/P Recorders Array
(A. H. Orsi)
The AnSlope Mooring Program is
lead by A.H. Orsi and T. Whitworth III,
The vast majority of the recovered 27 Aandera RCM current meters, 24 SeaBird MicroCat (SeaCat) recorders, and one Sonteck ADP operated well throughout the entire period of the measurements (Table cm- 1). Only one RCM current meter (520m on WEST-A) was flooded during deployment. Unfortunately six other RCMs (436m and 629m on WEST-C, 502m on CENTRAL-B2, 1097m on CENTRAL-D, 1266m on CENTRAL-E2, and 367m on EAST-B) lost their rotors during the adverse ice conditions encountered last year during deployment operations. Minor gaps in the current measurements were detected on data from just two RCMs (716m on CENTRAL-D, and 677m on CENTRAL-E2) and a single compass problem was found near the end of the record from the RCM located at 436m on mooring WEST-C. The data return from all MicroCat (SeaCat) recorders was exceptionally good. Nonetheless, four MicroCat pressure sensors experienced unexpected failure starting at different times of the year of records.
Measurements from this moored array revealed the extremely vigorous regime associated with the Antarctic Slope Current, where current speeds commonly exceed 100 cm/sec at various levels over the upper continental slope (Figure cm-2). Such energetic flow regime exerted a tremendous stress on the entire mooring array, which caused several of the moorings to undergo quite significant blow-over, particularly those located along the WEST array. A large number of the Aanderaa current meters displayed significant damage on their casings, rods, gimbals and other components, a type of damage well beyond the expected wear and tear from a normal one-year deployment. Seven of the recovered RCMs were reconditioned and re-deployed in the new array along with an additional set of eleven RCMs brought this year to the Palmer from OSU. Six of the acoustic releases were equipped with new battery packs and they were all reconditioned for re-deployment. The SeaBird instruments suffered no noticeable mechanical damage and all but three were reset for re-deployment in the new array.
A new group of six moorings (Figure cm- 1) were deployed for a second year of measurements across the slope in front of Drygalski Trough, at water depths between 500m and 1800m. Five moorings on this array (M1-M5) are instrumented with a total of 18 Aanderaa RCM8 current meters and 19 MicroCat (SeaCat) C/T/P recorders distributed at depths between 250m and 1750m. An upward-looking SonTeck ADP with two MicroCat recorders was moored near the bottom (ADP-2) at a location between the two southernmost moorings (M1-M2).
Measurements from this array will continue to provide information on the flow structure and variability of the Antarctic Slope Current, and on the multi level exchange of water masses from the Antarctic shelf and oceanic regimes.
All eleven recoveries of AnSlope-1 moorings took place between February 26 and 28, 2004. All six AnSlope-2 mooring deployments took place during the third week of the cruise, with the unexpected benefit of additional time for preparation as dictated by a standby storm delay. Less than optimal ice conditions were encountered during most of the mooring deployments, but in particular during the last deployment (M4). In some cases the final location of AnSlope-2 moorings is somewhat off the target position, and this is in part due to the tight availability of leads large enough to warrant deployment without compromising the integrity of the instruments. Fortunately no instruments were dragged over the ice and there was no ice-hang mooring, unlike last year.
The successful accomplishment of all of the original objectives set out for AnSlope’s mooring field program only reflects the outstanding work carried out by Jay Simpkins and Kathryn Brooksforce, from the Bouy Group at Oregon State University. Their dedication and professionalism shown throughout AnSlope 1-2 cruises made all of this possible. I am also grateful to Martin Visbeck, Chief Scientist on AnSlope-2, and to Captain Michel Watson for their patience and valuable experience demonstrated during mooring operations on the N. B. Palmer. I also want to thank the skillful assistance offered on deck by Raytheon personnel Emily Constantine, Jesse Doren, Josh Spillane and Annie Coward (MTs); Karl Newyear (MPC); Mary Hodgins (MST); Jeff (ET); Brendan Hart and Fred Martwick (OSU); Bruce Huber (LDEO) and Elio Paschini (Italy) ; the officers and crew of the N. B. Palmer (ship’s deck machinery); the ECO crew who ran the crane traction winch and A-frame; and the many people who assisted us with their careful handling of all of the instruments, like Giorgio Budillon (Italy), Margaret Knuth (MU), Bill Lipscomb (NCAR), Brad Range (BoyScout). Thanks to Sheldon Blackman for arranging the cable that allowed our acoustic ranging through the ship’s transducer, which in turn reduced a considerable amount of ship time, and to Suzanne O’Hara for producing a wide variety of specialized maps.
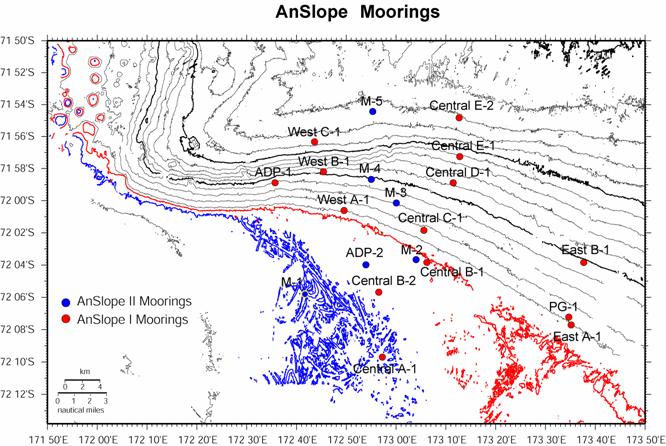
Figure cm-1
Figure cm-2

TABLE cm-1
---------------------------------------------------------------------------
MOORING LONGITUDE
LATITUDE BOTTOM LONGITUDE EAST LATITUDE SOUTH
NAME (m) deg
min deg min
---------------------------------------------------------------------------
ADP-1
172.5947 -71.9815 890
172 35.683 71
58.887
WEST-A
172.8263 -72.0100 609
172 49.576 72
0.604
WEST-B
172.7570 -71.9700 1025
172 45.421 71
58.199
WEST-C
172.7273 -71.9388 1630
172 43.642 71
56.326
CENTRAL-A
172.9540 -72.1617 505
172 57.236 72
9.699
CENTRAL-B1
173.1027 -72.0640 549
173 6.164 72
3.835
CENTRAL-B2
172.9417 -72.0947 525
172 56.500 72
5.681
CENTRAL-C
173.0928 -72.0307 651
173 5.568 72
1.840
CENTRAL-D
173.1908 -71.9815 1118
173 11.446 71
58.887
CENTRAL-E1
173.2125 -71.9542 1407
173 12.750 71
57.250
CENTRAL-E2
173.2115 -71.9138 1772
173 12.689 71
54.830
EAST-B
173.6282 -72.0640 982
173 37.689 72
3.843
PG-1
173.5783 -72.1203 627
173 34.696 72
7.223
EAST-A
173.5860 -72.1285 597
173 35.157 72
7.708
M1
172.6953 -72.0968 498
172 41.724 72
5.806
ADP-2
172.8995 -72.0663 537
172 53.967 72
3.983
M2 173.0665 -72.0610
541 173 3.993
72 3.657
M3
173.0007 -72.0025 664
173 0.040 72
0.146
M4
172.9170 -71.9778 1002
172 55.019 71
58.674
M5
172.9222 -71.9072 1756
172 55.331 71
54.434
---------------------------------------------------------------------------
MOORING DEPLOYMENT RECOVERY
NAME DATE DATE
---------------------------------------------------------------------------
ADP-1
WEST-A
WEST-B
WEST-C
CENTRAL-A
CENTRAL-B1
CENTRAL-B2
CENTRAL-C
CENTRAL-D
CENTRAL-E1
CENTRAL-E2
EAST-B
PG-1
EAST-A
M1
ADP-2 8-9
March 2004
M2
M3
M4
M5
---------------------------------------------------------------------------
S/N MOORING INST DEPTH SENSORS
NOTES
---------------------------------------------------------------------------
2504 ADP-1 MicroCat 731 CTP
3.0k
2505 ADP-1 MicroCat 809 CTP
3.0k
1264 ADP-1 MicroCat 872 CTP
1.5k
C63 ADP-1 Sonteck 878 UVTP 1.5k
---------------------------------------------------------------------------
1542 WEST-A RCM 419 UVTP
1.0k
3123 WEST-A RCM 520 ----
3.0k FLOODED AT DEPLOYMENT
6088 WEST-A RCM 587 UVT-
2530 WEST-A MicroCat 597 CTP
3.0k
---------------------------------------------------------------------------
3190 WEST-B RCM 432 UVTP
1.0k
5866 WEST-B RCM 632 UVTP
3.0k COMPASS PROBLEM
2536 WEST-B MicroCat 828 CTP
3.0k PRESSURE PROBLEM
(starts Oct. 16)
4916 WEST-B RCM 1004 UVT-
0419 WEST-B MicroCat 1014 CT-
---------------------------------------------------------------------------
6731 WEST-C RCM 436 --TP
1.0k* LOST ROTOR AT DEPLOY.
*OVER RANGED
5868 WEST-C RCM 629 --TP
3.0k LOST ROTOR AT DEPLOY.
2527 WEST-C MicroCat 923 CTP
3.0k PRESSURE PROBLEM
(starts Sept. 2)
2281 WEST-C RCM 1238 UVTP
5.0k
2528 WEST-C MicroCat 1428 CTP
3.0k PRESSURE PROBLEM
(starts Oct. 29)
4917 WEST-C RCM 1609 UVT-
0420 WEST-C MicroCat 1619 CT-
---------------------------------------------------------------------------
2529 CENTRAL-A MicroCat 273 CTP
3.0k
6732 CENTRAL-A RCM 377 UVTP
1.0k
5857 CENTRAL-A RCM 484 UVT-
0418 CENTRAL-A MicroCat 494 CT-
---------------------------------------------------------------------------
2537 CENTRAL-B1 MicroCat 290 CTP
3.0k
7165 CENTRAL-B1 RCM 398 --TP
1.0k LOST ROTOR AT DEPLOY.
6730 CENTRAL-B1 RCM 526 UVTP
1.0k DIRECTION PROBLEM
0719 CENTRAL-B1 SeaCat 536 CTP
2.0k
---------------------------------------------------------------------------
2535 CENTRAL-B2 MicroCat 281 CTP
3.0k
688 CENTRAL-B2 RCM 381 UV-
6730 CENTRAL-B2 RCM 502 --- LOST
ROTOR AT DEPLOY.
0719 CENTRAL-B2 SeaCat 512 CTP
2.0k
---------------------------------------------------------------------------
2531 CENTRAL-C MicroCat 349 CTP
3.0k
6733 CENTRAL-C RCM 449 UVTP
3.0k
7214 CENTRAL-C RCM 551 UVTP
1.0k
5859 CENTRAL-C RCM 630 UVT-
0421 CENTRAL-C MicroCat 639 CT-
---------------------------------------------------------------------------
2532 CENTRAL-D MicroCat 403 CTP
3.0k
6737 CENTRAL-D RCM 508 UVTP
1.0k* OVER RANGED
1534 CENTRAL-D RCM 716 UVTP
5.0k U,V GAP
(Oct 12-Nov 13)
2533 CENTRAL-D MicroCat 910 CTP
3.0k PRESSURE PROBLEM
(starts May 9)
5860 CENTRAL-D RCM 1097 --T- LOST
ROTOR AT DEPLOY.
0422 CENTRAL-D MicroCat 1107 CT-
---------------------------------------------------------------------------
2534 CENTRAL-E1 MicroCat 96 CTP
3.0k
7162 CENTRAL-E1 RCM 198 UVTP
1.0k
1540 CENTRAL-E1 RCM 412 UVTP
5.0k
2535 CENTRAL-E1 MicroCat 700 CTP
3.0k
5862 CENTRAL-E1 RCM 1030 UVTP
5.0k
2526 CENTRAL-E1 MicroCat 1205 CTP
3.0k
5861 CENTRAL-E1 RCM 1386 UVT-
0423 CENTRAL-E1 MicroCat 1396 CT-
---------------------------------------------------------------------------
2534 CENTRAL-E2 MicroCat 354 CTP
3.0k
7162 CENTRAL-E2 RCM 461 UVTP
1.0k* OVER RANGED
1540 CENTRAL-E2 RCM 677 UVTP
5.0k U,V DATA GAPS
(starting Dec 18)
2537 CENTRAL-E2 MicroCat 965 CTP
3.0k
6087 CENTRAL-E2 RCM 1266 --T- LOST
ROTOR AT DEPLOY.
2526 CENTRAL-E2 MicroCat 1468 CTP
3.0k
5861 CENTRAL-E2 RCM 1751 UVT-
0423 CENTRAL-E2 MicroCat 1761 CT-
---------------------------------------------------------------------------
7769 EAST-B RCM 367 --TP
1.0k* LOST ROTOR AT DEPLOY.
* OVER RANGED
2268 EAST-B RCM 586 UVTP
5.0k
5900 EAST-B RCM 961 UVT-
0425 EAST-B MicroCat 971 CT-
---------------------------------------------------------------------------
0711 BPR SeaCat 626 CTP PRESSURE PROBLEM
(starts
---------------------------------------------------------------------------
2528 M1 MicroCat 247 CT-
6732 M1 RCM 248 UVTP
1.0k
2537 M1 MicroCat 397 CTP
3.0k
751 M1 RCM 398 UVT-
5900 M1 RCM 478 UVT-
0425 M1 MicroCat 488 CT-
---------------------------------------------------------------------------
C180 ADP-2 Sonteck 521 UVTP 1.5k
1264 ADP-2 MicroCat 522 CTP
1.5k
0419 ADP-2 MicroCat 527 CT-
---------------------------------------------------------------------------
0719 M2 SeaCat 290 CTP
2.0k
5859 M2 RCM 291 UVT-
2535 M2 MicroCat 440 CTP
3.0k
1536 M2 RCM 441 UVT-
4916 M2 RCM 521 UVT-
0423 M2 MicroCat 531 CT-
---------------------------------------------------------------------------
2504 M3 MicroCat 363 CTP
3.0k
10114 M3 RCM 364 UVT-
2532 M3 MicroCat 463 CTP
3.0k
9806 M3 RCM 464 UVT-
2527 M3 MicroCat 564 CT-
7408 M3 RCM 644 UVT-
0420 M3 MicroCat 654 CT-
---------------------------------------------------------------------------
2534 M4 MicroCat 398 CTP
3.0k
5868 M4 RCM 399 UVTP
3.0k
2505 M4 MicroCat 598 CTP
3.0k
7165 M4 RCM 599 UVT-
2531 M4 MicroCat 798 CTP
3.0k
5873 M4 RCM 799 UVT-
5865 M4 RCM 979 UVT-
0421 M4 MicroCat 989 CT-
---------------------------------------------------------------------------
2526 M5 MicroCat 455 CTP
3.0k
7214 M5 RCM 456 UVTP
3.0k
2530 M5 MicroCat 655 CTP
3.0k
5856 M5 RCM 656 UVT-
2536 M5 MicroCat 1055 CT-
2281 M5 RCM 1056 UVTP
5.0k
2529 M5 MicroCat 1555 CTP
3.0k
1531 M5 RCM 1556 UVT-
1236 M5 RCM 1736 UVT-
0418 M5 MicroCat 1746 CT-
---------------------------------------------------------------------------
Final correction, reduction and management of all data collected on AnSlope moorings will be performed at the Buoy Group of Oregon State University (httpd:// kepler.coas.oregonstate.edu).
2.3 XBT/XCTD Section
Toward the end of the cruise we got a request from N. Wienders and K. Speer at FSU for salinity data in the
vicinity of recent ARGO float surfacing positions for calibration purposes.
Since there was not enough time to stop for CTD stations but 7 spare XCTDs were available and since we were planning on a XBT
section across the ACC it was decided to combine the two. 84 T-7 XBTs (760m maximum depth), 1 XCTD (1000m) and 6 XCTD deep
(1850m) were used. Figure [XBT-1] shows the drop positions (circles for XBTs, crosses for XCTDS) as well as the locations of recent
ARGO-float fixes (red/yellow bullets). XBT/XCTD drops were carried out every 10
minutes of latitude between 67S and the edge of the New Zealand EEZ at 55:10S. XCTDs were substituted for XBTs
near float-surfacing positions.
Out of the 7 available XCTDs only
a single one was recognized by the launch computer. It was launched at 58:30S
and failed at 525m, above its pressure-point calibration trigger. (According to
the online manual, XCTDs use a calibrated pressure
trigger that sends a signal at a predetermined depth. If that signal is received
by the logging computer the depth, usually calculated from the drop speed, can
be improved. For float-calibration purposes the depth correction is not
important because the calibrations can be carried out in T/S or, preferably, in
T/conductivity space. Uncalibrated depths are
expected to be as accurate as those from XBTs. In none
of the XCTDs used the pressure-point calibration
worked.) When the remaining, apparently broken, XCTDs
were tested using a launcher directly connected to the logging computer
(bypassing the wiring inside the ship) all of them were recognized without
problems. Therefore, the logging computer was moved to the wet lab and the
remaining 6 XCTDs were deployed near the latitudes of
the last known float positions. Launch sucess rate
was 100%, although 3 XCTDs failed during descent (at
525m, 1409m, and 416m).
Based on T/S comparisons of nearby station pairs the XCTD
salinities are consistent to within 0.05 or better. The T/S data of XCTD
station 230 and WOCE P14 station 10 (done in 1997, 50km away) are consistent to
within approximately 0.01--0.02 in salinity.
The figure below is derived from the unprocessed T-7 XBT probes launched during the section, color coded for temperature. Each profile is offset by 1°C. Profile spacing is nominally 10 nmile.
2.4
TIDE-sADCP
(G. Budillon)
The data
collected by the ship ADCP have been
processed in order to filter the tide component.
The applied
method assumes that the characteristic of tide doesn't changes significantly in
a limited area and consequently the data collected in such area can be used as
a single time series as if they had been measured in a single point (like with
a fixed currentmeter). The analysis of the tide has
been performed using the software “T_Tide” (Pawlowicz et al., 2002).
Such
procedure has been applied for all the data collected by the sADCP during the cruise selecting different geographical
areas, but only for those acquired in the mooring area and off
The most significant
results have been obtained in the subsurface layers and averaging all the sADCP data available (layer 031-425 m).
Figure XX
shows the measured (red) and residual (measured-tide; black) currents in the
mooring area for the whole measured water column revealing along the slope the
presence of a strong north-westward flows which follow the isobath.
Over and outside the shelf the currents are less strong.
A spectral
analysis of the sADCP detided
current (not shown here) revealed that a not negligible energy is still present
at the diurnal frequencies, for both u and v components, which most likely
means that the assumption of a non-changing tide on the whole area may be not
exact. Actually the worse results have been obtained in the north-west sector:
the residual vectors often crossed each other, which is obviously not true.
A more
careful analysis may obtain better results.
Pawlowicz
R., Beardsley B., Lentz S. 2002 Classical tidal harmonic analysis including
error estimates in MATLAB using T TIDE” Computers & Geosciences 28: 929–937
Figure XX –
Ship ADCP velocities averaged in the layer 031-425 m (top, red vectors) and
residual velocities (bottom, black vectors).
Using the
velocities measured by the sADCP we have
discriminated the casts performed during northward and southward flows in the
Mooring Area. Analyzing the bottom temperature (deeper 5 dbar
averaged) we observed (Figure YY) a significant modification during these two
conditions. Actually during the southward flow the -1.0 isotherm is confined in
the inner part of the shelf while with a northward flow it moves northward. In
addition two apparent tongues of cold water happen during the northern flows in
correspondence of stations 83 and 31.
Figure YY –
Comparison between the bottom temperature measured during northward (blue) and
southward (red) flows.
2.5
MOORING
G - CLIMA
(G. Budillon)
The Italian mooring
“G” has been deployed on February 6th 2003 at 72°
24.057’S and 173° 05.066’E at a depth of 512 m - in the Drygalski trough south of the AnSlope
mooring array – several miles northward respected to the planned deployment
location cause the presence of the iceberg C-19 and ice conditions. This
mooring, composed by two Aanderaa RCM9 (426 and 495
m) and a temperature and conductivity recorder SBE 37
(502 m) has been recover and re-deployed on January 2004 by the Italian
group and some analyses of the data has been performed during the AnSlope II cruise.
The
current meter at 426 m measured an averaged northward speed of 0.12 ms-1
on the whole period characterized by a high variability (std = 0.38 ms-1)
mostly due to the diurnal tide.
The
analysis of the tide revealed that the most energetic components are K1 and O1;
using the five most important constituents (O1, K1, P1, Q1, and M2
respectively) one can predict more than 90% of the original variance.
Comparing
the current and thermohaline data collected at 426 m
we detected repeated “warm episodes” over all the measured period as show by
the Theta/S diagram (Figure ZZ) which are possibly related with the north-south
shift of the slope front or with warm tongues of modified CDW (MCDW) which
“pierces” the thermal front intruding over the shelf. Such intrusions have been
already detected in previous surveys but nothing was known on their recurrence
and persistence.
Figure ZZ – Theta/S diagram at 426 m, Mooring G
(February 2003 – January 2004).
As shown in Figure WW such “warm episodes” are
generally related, as expected, with the diurnal tide. During the neap tide
periods they may be persistent (red arrows) or they can completely disappear
(blue arrows). Such behaviour is obviously associated to the energetic
contribution of longer periods which modulate the dynamic of the slope front.
![]()
Figure WW – Time series (100 days) at 426 m, Mooring G; measured (blue),
tidal (green), and residual (red) components. Red and blue arrows show
respectively the presence and the absence of the warm intrusions during the
neap tides.
The rotary spectrum analysis of the residual
(measured-tidal) current (Figure KK) suggests that the contribution of energy
between 5 and 20 days (particularly at 10 days) may play an important role in
modulating the behaviour of the frontal dynamics. Moreover are still present
some peaks with not negligible energy - in the anti-clockwise component – with
a period of about 24 hours. They can be explained with the presence of few
tidal components still present in the residual current also after filtering the
tide or with the presence of ≈24 hours periods of non-astronomical
origin.
The contribution of components with period less
than 20 hours, included the inertial currents, appears to be not significant.
 Figure KK – Rotary Spectrum of the residual (measured-tidal) current:
top clockwise, bottom anti-clockwise component. Aanderaa
at 426 m, Mooring G (February 2003 – January 2004).
Figure KK – Rotary Spectrum of the residual (measured-tidal) current:
top clockwise, bottom anti-clockwise component. Aanderaa
at 426 m, Mooring G (February 2003 – January 2004).
3
Appendices
3.1 Station maps
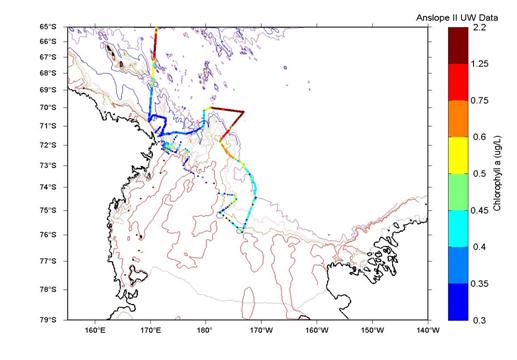
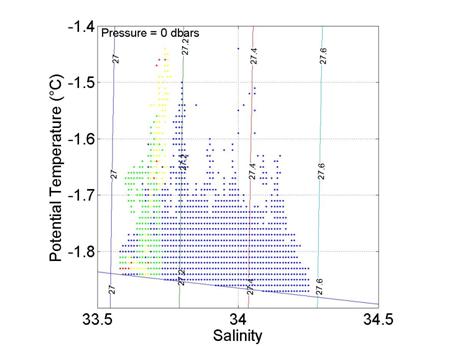



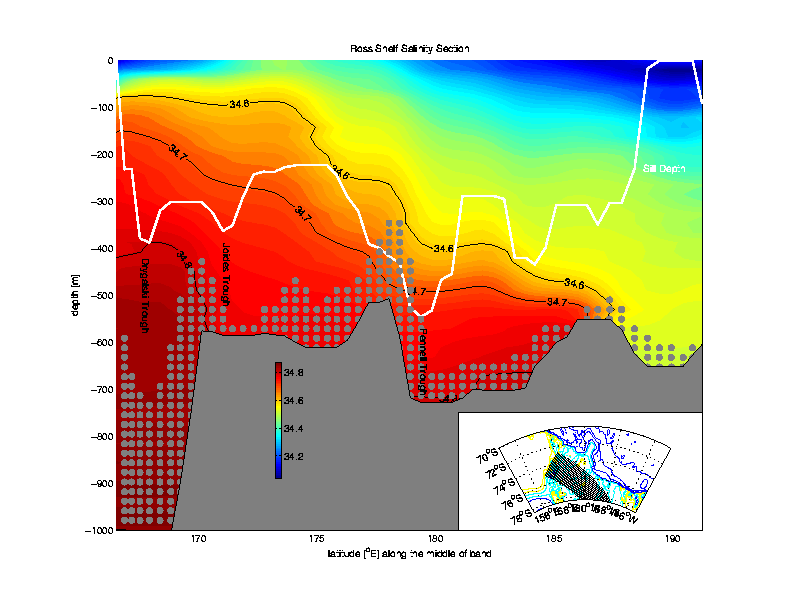{kind=link}
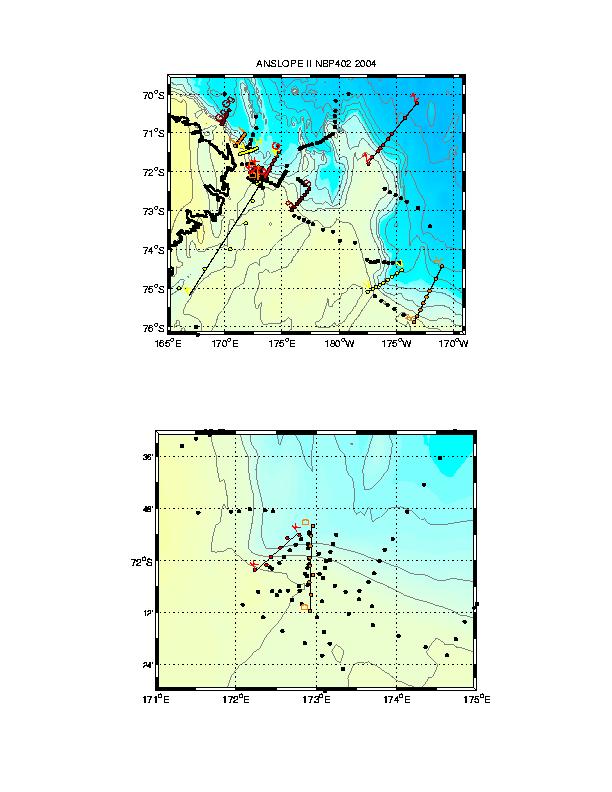{kind=link}
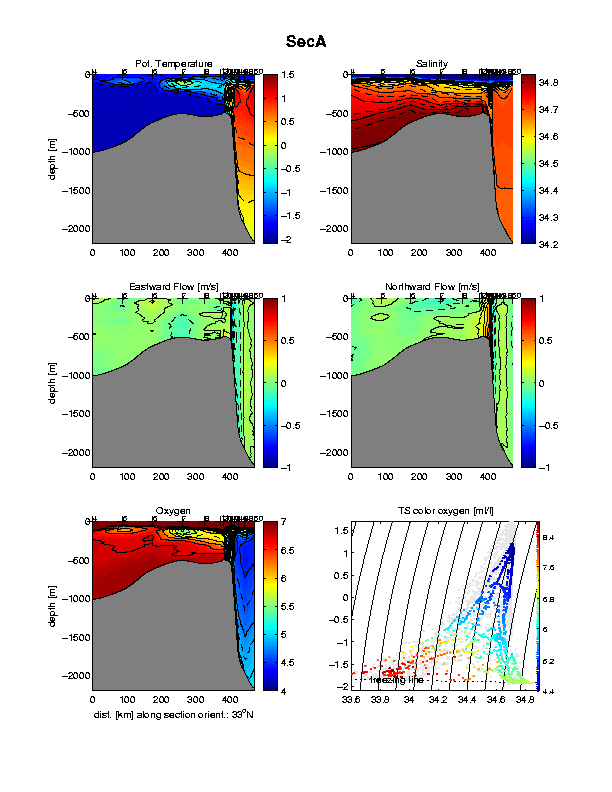{kind=link}
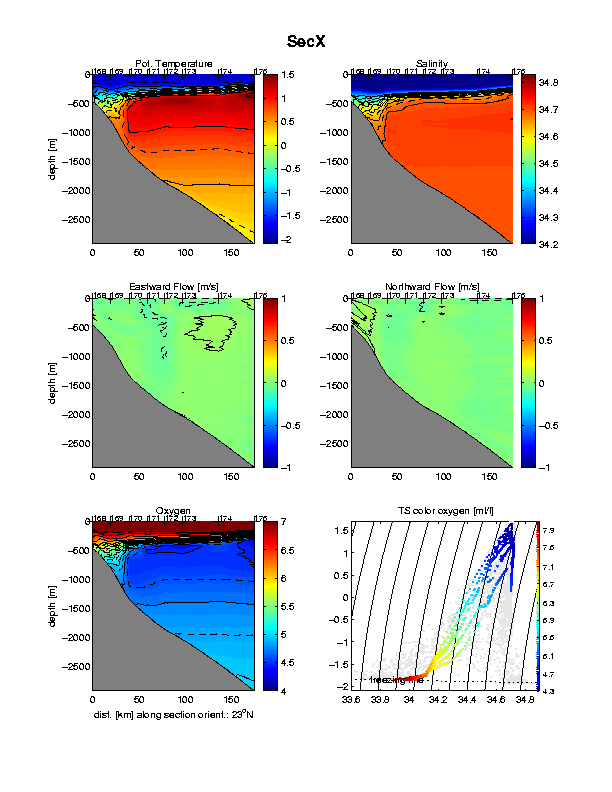{kind=link}
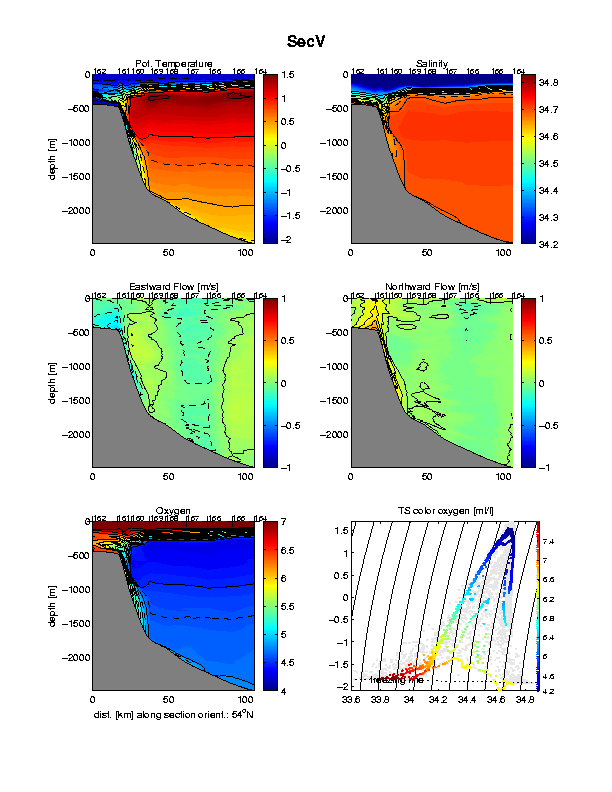{kind=link}
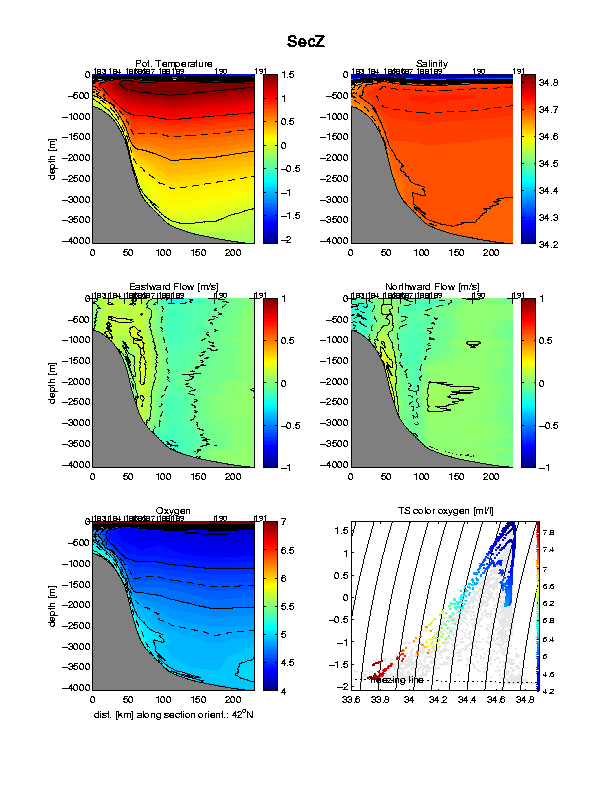{kind=link}
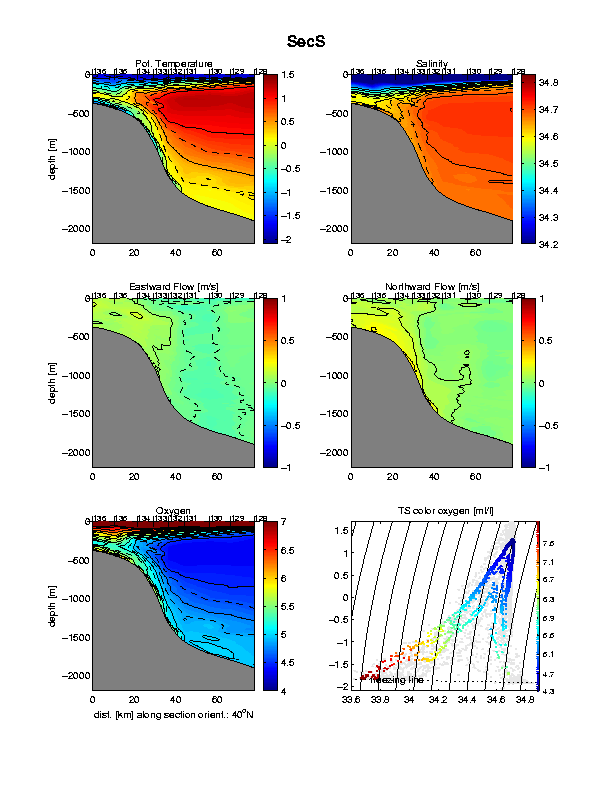{kind=link}
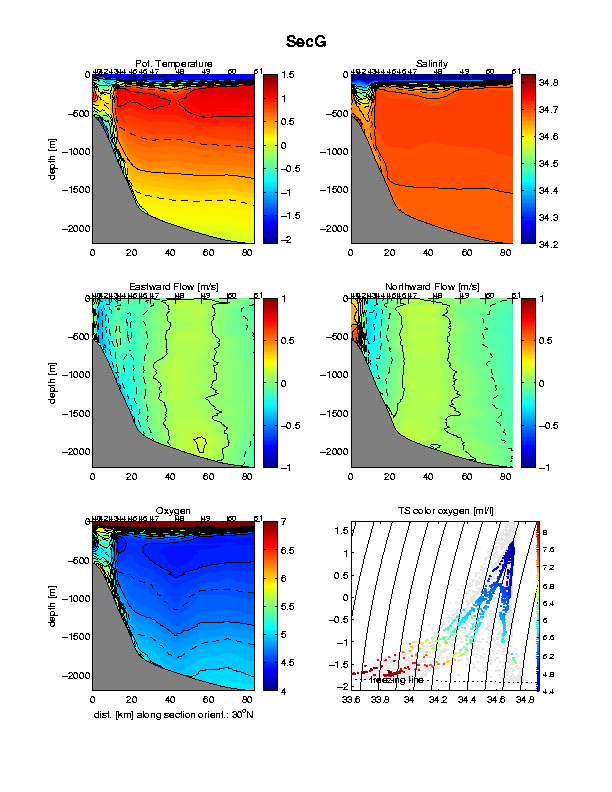{kind=link}
{kind=link}
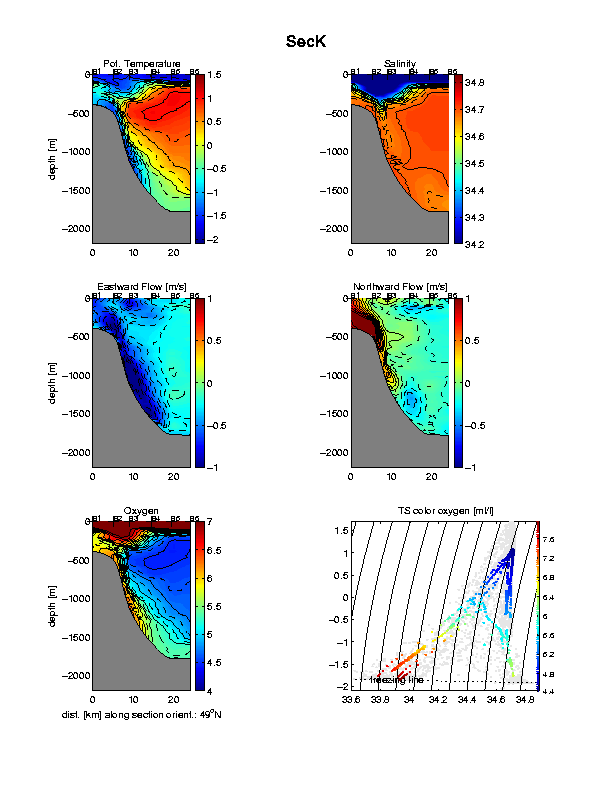{kind=link}
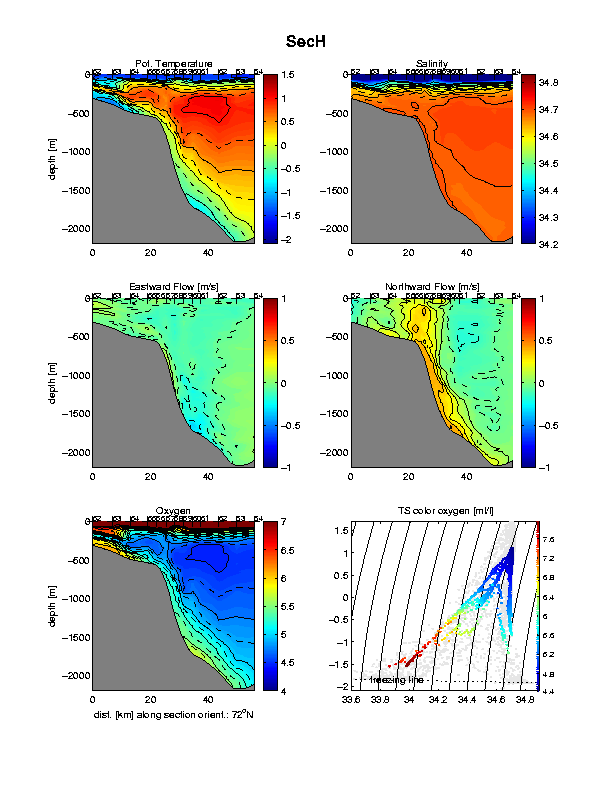{kind=link}
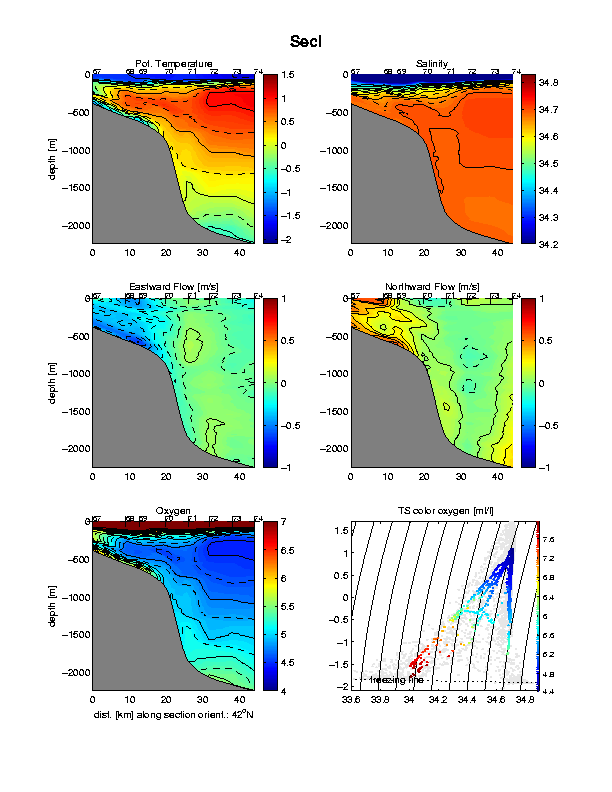{kind=link}
{kind=link}